Dispozitivul sau mașina electromecanică utilizată în diferite scopuri și sunt controlate și operate cu ajutorul tehnicilor de programare este numit robot. Roboții sunt diferite tipuri pe baza aplicațiilor lor, cum ar fi roboți industriali , roboți militari, roboți spațiali, roboți domestici, roboți de mers pe jos, roboți de cățărat și așa mai departe. Cel mai avansat proiecte robotice sunt dezvoltate pentru utilizarea eficientă în diferite domenii pentru mai multe aplicații. În acest articol, haideți să discutăm despre un tip special de proiecte robotice, și anume vehiculul robot care urmărește linia cu mecanism de mers și urcare.
Vehicul robotizat

Proiecte de robotică pentru studenții ingineri
vehicule robotizate sunt tipuri speciale de mașini concepute pentru a se deplasa la sol, în aer, sub apă și în spațiu în mod autonom, fără un om la bord. Aceste vehicule robotizate sunt controlate și operate de către diverși senzori sisteme de control bazate pe. Vehiculele robotizate sunt special concepute pentru a fi utilizate în condiții în care ființele umane nu pot intra, cum ar fi accidentele de incendiu, temperaturile foarte ridicate sau foarte scăzute etc.,.
Robot de urmărire a liniei

Robot de urmărire a liniei
Vehiculul robot care se deplasează urmând o anumită cale sau linie poate fi denumit ca robot adept de linie . Acești roboți adepți de linie sunt folosiți special în aplicații industriale în scopuri speciale, cum ar fi transportul diferitelor piese sau mașini sau vehicule (mașini, biciclete etc.) urmând linia specifică de la un punct (unitate generatoare) la alt punct (unitate de asamblare) .
Linia normală care urmează unui vehicul robotizat cu caracteristici speciale, precum mecanismul de mers și urcare este una dintre proiecte de robotică interesante pentru studenții ingineri , care poate fi utilizat pentru mai multe aplicații. Pașii simpli pentru proiectarea unui robot de linie cu mecanism de mers și urcare sunt arătați mai jos.
Pasul 1: Adunarea componentelor necesare

Componente electrice și electronice
Componentele necesare liniei de proiectare în urma unui vehicul robotizat cu mecanism de mers și urcare trebuie să fie estimate pe baza aplicației robotului. Adunați toate componentele electrice și electronice, cum ar fi rezistențe, condensatori, transmițătoare IR, motoare de curent continuu, tranzistoare, corpul robotului și fotodiodele cu ratinguri corespunzătoare, împreună cu alte părți, cum ar fi carton, șuruburi, piulițe, benzi de aluminiu etc., conform cerințelor.
Pasul 2: Analizarea circuitului pentru robotul de urmărire a liniei

Linia de urmărire a vehiculului robotizat extensibil la diagrama blocului de mers pe jos și alpinism
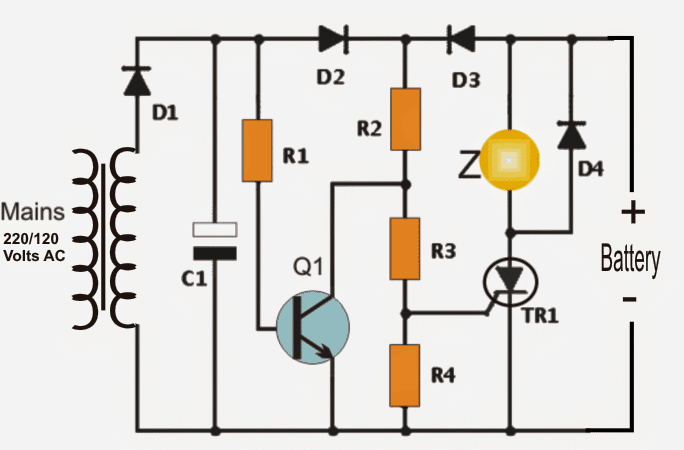
Proiectați în principal o diagramă bloc a circuitelor proiectului cu diferite blocuri, cum ar fi a bloc de alimentare , LED-uri IR și bloc fotodiodă și așa mai departe. După adunarea componentelor, analizați proiectarea circuitului pe baza diferitelor componente utilizate. Apoi așezați componentele peste o placă fără sudură, conform schemei de circuite, utilizând fire de conectare pentru testarea funcționării circuitului înainte de asamblarea circuitului pe PCB. Testând circuitul peste panoul de lipit fără sudură dacă este necesar să se facă modificări în circuit sau ratingul componentelor, alternanțele se pot face cu ușurință fără a pierde bani și timp pentru înlocuirea componentelor sau pentru a modifica designul circuitului.
Pasul 3: Asamblarea și lipirea componentelor

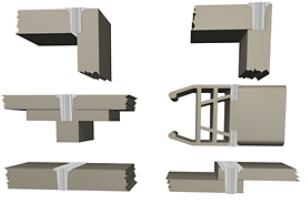
Linia de urmărire a vehiculului robotizat extins la proiectul robotului de mers pe jos și alpinism
Astfel, după analizarea proiectării circuitului, asamblați componentele conform schemei de circuite de pe PCB. Apoi, lipiți circuitul folosind pistolul de lipit și firul de lipit, urmând instrucțiunile de lipire corespunzătoare. Conectați în mod corespunzător toate părțile robotului pentru a forma un robot de linie, așa cum se arată în imaginea de mai sus și lipiți părțile vehiculului robot, dacă este necesar.
Pasul 4: Lucrarea robotului Line Follower
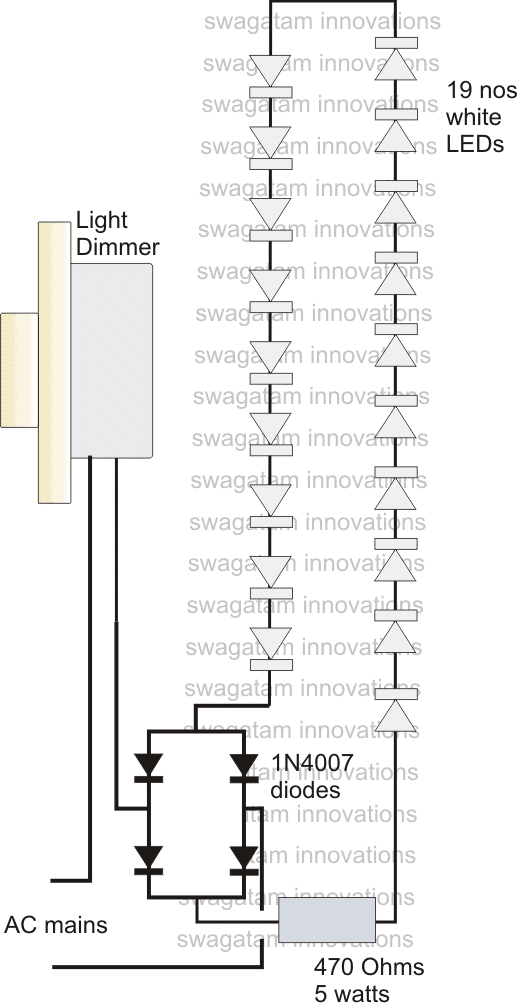
Transmițătorul IR și fotodioda sunt utilizate ca fotosensor pereche care poate fi utilizată pentru detectarea traseului specificat pentru mișcarea robotului de linie în timp ce mergeți și urcați pe pereți. Perechea de fotosensori oferă semnale adecvate pentru comutarea tranzistoarelor pentru acționarea motoarelor robotului de linie.
Pasul 5: vehicul robotizat de urmărire a liniei cu mecanism de mers și urcare
Există numeroase proiecte de robotică pentru studenții ingineri în care vehicul robotizat de linie cu mecanism de mers și urcare este un proiect inovator și interesant de proiectat pe cont propriu utilizând cartea noastră electronică gratuită pentru a proiecta proiecte electronice.
aplicarea roboticii crește rapid în viața noastră de zi cu zi pentru mai multe funcții, cum ar fi aplicații industriale - mutarea sau ridicarea produselor grele, transportul într-o zonă limitată urmând o cale specifică, prelucrarea, sudarea, electrocasnice, roboți autonomi, roboți militari pentru reducerea omului implicare și pericol, roboți colaborativi pentru interacțiunea cu omul astfel încât pentru îndeplinirea mai multor sarcini, roboți educaționali, roboți mobili și umanoizi.
Ești interesat de proiectare proiecte electronice pe cont propriu? Știi cum să dezvolți roboți umanoizi? Dacă doriți să aflați mai multe despre proiectele de robotică pentru studenții ingineri, atunci puteți posta întrebările, comentariile, ideile și sugestiile dvs. în secțiunea de comentarii de mai jos pentru orice ajutor tehnic.