În acest post vom discuta elementele de bază ale ansamblului corpului quadcopter folosind țevi și șuruburi din aluminiu, în secțiunile ulterioare ale articolului vom discuta, de asemenea, cu privire la un circuit simplu de dronă care ar putea fi folosit pentru a zbura un ansamblu mic de dronă fără a depinde de microcontrolere complexe.
Un quadcopter este probabil cea mai simplă mașină de zbor care necesită o precizie aerodinamică minimă și complicații și, prin urmare, nu este o surpriză, ar putea câștiga o popularitate imensă printre diferiții pasionați care ar putea construi cu succes acest ... o mașină pe care ar putea să o piloteze și controlează după voia lor.
Dinamica Quadcopter
Faptul că o dronă quadcopter este cel mai simplu din punct de vedere tehnic și dinamic se datorează de fapt implicării a 4 elice și a unei structuri de cadru echilibrate, care permit mașinii să zboare cu un echilibru relativ bun, chiar și în condiții climatice dificile.
Dar simplitatea implică, de asemenea, că sistemul ar putea să nu fie la fel de eficient ca modelele convenționale de avioane și elicoptere, care sunt concepute pentru a prezenta o eficiență extremă în ceea ce privește viteza și consumul de combustibil și, desigur, capacitatea de încărcare ... toate acestea ar putea fi în esență lipsit de un sistem tipic quadcopter.
Cu toate acestea, în ceea ce privește un proiect de hobby, această mașină devine alegerea ideală pentru majoritatea entuziaștilor care consideră că este foarte amuzant și intrigant să-și construiască o mașină zburătoare, acasă, care în cele din urmă „ascultă” și zboară în orice direcție utilizatorul preferă să se mute.
Cu toate acestea, pentru un jucător nou, care poate să nu fie atât de informat din punct de vedere tehnic, poate găsi chiar și această mașină simplă extrem de complicată de înțeles, pur și simplu pentru că majoritatea informațiilor conexe prezentate pe numeroasele site-uri web nu reușesc să discute conceptul lucid și într-un „limbaj” care s-ar potrivi unui laic.
Acest articol a fost scris special pentru cei care nu sunt atât de tehnici, care sunt interesați să construiască o mașină de zbor magnifică, dar consideră că subiectul este prea greu de digerat.
De ce Quadcopterele sunt atât de ușor de construit astăzi
V-ați întrebat vreodată de ce quadcopterele și dronele sunt atât de ușor de construit în lumea de astăzi și poate că a fost imposibil mai devreme folosind electricitatea?
Aceasta se datorează practic dezvoltării și îmbunătățirii bateriilor Li-Ion. Acestea sunt forme extrem de eficiente de baterii disponibile astăzi, care oferă un raport impresionant putere / greutate. Odată cu aceasta, invenția motoarelor BLDC și a motoarelor cu magnet permanent foarte rafinate au contribuit, de asemenea, la transformarea dronelor ușor de construit.
Bateria Li-Ion este capabilă să ofere o cantitate extraordinară de cuplu de rotație pe motoare, care devine suficientă pentru a împinge unitatea quadcopter la o altitudine ridicată deasupra solului în câteva secunde și, de asemenea, îi permite să rămână în aer pentru o durată lungă de timp performanța foarte eficientă și utilă.
Cum zboară Quadcopter
Acum să sărim corect și să înțelegem care sunt lucrurile esențiale necesare pentru ca un quadcopter să zboare cu succes. Iată elementele de bază pentru a face mașina să zboare fără probleme:


1) Practic utilajul necesită un corp ferm și puternic, dar extrem de ușor în greutate. Aceasta ar putea fi fabricată sau asamblată folosind țevi de extrudare din aluminiu, pătrate, prin găurirea corespunzătoare și fixarea cadrului cu piulițe și șuruburi.
2) Structura ar trebui să aibă forma unui „+” perfect sau a unui „x” perfect, nu face diferența atâta timp cât unghiul dintre țevile „de trecere” este de 90 de grade fiecare.

Elementele de bază necesare pentru construirea unui quadcopter pot fi văzute în următoarea imagine:

Simulare asamblare piesă
Simularea animată brută de mai jos arată cum să asamblați elementele prezentate mai sus împreună:

Cum se construiește Quadcopter Framework
Aluminiu pentru cadrul „+” poate fi achiziționat prin tăierea și dimensionarea corespunzătoare a tuburilor de extrudare din aluminiu gata făcute, după cum se arată mai jos:

Dimensiunea cadrului este relativă și, prin urmare, nu este crucială, puteți construi un cadru larg cu motoarele montate la distanță sau puteți construi o structură de cadru destul de compactă în care motoarele nu sunt prea largi ... deși trebuie să vă asigurați că elicele sunt bine distante unele de altele pentru a permite un echilibru și un echilibru mai bun.
3) Structura cadrului „+” trebuie să fie prevăzută cu o platformă pătrată la secțiunea centrală unde brațele cadrului se întâlnesc și se încrucișează. Ar putea fi pur și simplu o placă de aluminiu bine lustruită, dimensionată corespunzător pentru a găzdui confortabil toate componentele electronice și cablurile necesare.
Astfel, această placă centrală sau platforma este necesară în esență pentru instalarea și adăpostirea electronicii sistemului, care ar fi în cele din urmă responsabilă pentru controlul quadcopterului.
4) Odată ce cadrul de mai sus este finalizat, motoarele trebuie fixate peste capetele barelor transversale, așa cum se arată în figurile de mai sus.
5) Este inutil să spunem că toate lucrările de montaj trebuie să fie făcute cu cea mai mare precizie și alinierea perfectă, aceasta ar putea necesita asocierea unui fabricant cu experiență pentru locul de muncă.
Deoarece totul în proiectare este în perechi, alinierea corectă a elementelor nu va fi de fapt prea dificilă, este vorba doar de dimensionarea și montarea perechilor cu cât mai multă asemănare posibil, ceea ce va asigura la rândul său un nivel maxim de echilibru, echilibru și sincronizare pentru sistem.
Odată ce cadrul este construit, este timpul să integreze circuitele electronice cu motoarele relevante. Acest lucru va trebui făcut conform instrucțiunilor furnizate în manualul de circuit dat.
Plăcile de circuite ar putea fi montate pe partea inferioară a plăcii centrale cu o carcasă adecvată sau peste placă, din nou cu un dulap adecvat pentru a o închide strâns.

Înțelegerea direcției de rotație a elicelor
Analiza direcției de rotație a elicelor motorului pentru o ridicare echilibrată a:
Referindu-ne la simularea animată de mai sus, direcția de rotație a elicelor motorului trebuie aliniată în modul următor:
Pur și simplu trebuie să fie astfel încât motoarele de la capetele unei tije să fie identice, dar diferite de direcția motorului celeilalte tije, adică dacă o tijă are motoarele care se rotesc în sensul acelor de ceasornic, atunci motoarele de la capetele celeilalte completează tija trebuie reglată pentru a se roti în sens invers acelor de ceasornic. direcţie.
Vă rugăm să consultați simularea de mai sus pentru a înțelege corect mișcarea de acțiune contrară a motoarelor care ar putea fi necesare pentru a fi atribuite motoarelor pentru a asigura o preluare echilibrată a
Cum să controlați direcția quadcopterului controlând viteza motoarelor.
Da, direcția de zbor a quadcopterului poate fi modificată și controlată conform propriei dorințe și voinței prin simpla aplicare a diferitelor viteze (RPM) motoarelor respective.
Următoarele imagini arată modul în care transmisia de bază a vitezei poate fi aplicată motoarelor relevante pentru a realiza și executa orice direcție de zbor dorită către mașină:




Așa cum este indicat în diagramele de mai sus, prin scăderea corespunzătoare a vitezei unui set de motoare sau creșterea vitezei setului opus de motoare sau modificarea vitezelor conform preferințelor proprii, quadcopterul poate fi călătorit în aer în orice direcția specifică dorită.
Imaginile de mai sus indică direcțiile de bază, cum ar fi înainte, înapoi, dreapta, stânga etc ... cu toate acestea, orice altă direcție ciudată poate fi implementată în mod eficient prin ajustarea adecvată a turațiilor motoarelor relevante sau poate fi doar un singur motor.
De exemplu, pentru a forța mașina să zboare în direcția N / W, viteza numai a motorului S / E poate fi mărită și, pentru a permite mașinii să zboare în direcția N / E, viteza S / E Motorul W poate fi mărit ... și așa mai departe. Trebuie doar practicat până când controlul complet al quadcopterului devine realizabil și stăpânit de utilizator.
Proiectarea unui Quadcopter practic
Până acum am aflat despre construcția de bază a corpului și hardware-ului dronelor, acum să învățăm cum să realizăm un quadcopter sau un circuit de dronă rapid și ieftin folosind componente foarte obișnuite. Într-una din postările mele anterioare am învățat cum să facem o mașină de zbor quadcopteră relativ complexă și, prin urmare, eficientă, fără a utiliza microcontroler, pentru mai multe informații, ați dori să parcurgeți următoarele postări:
Circuit de telecomandă fără MCU | Circuit electronic
În prezentul articol încercăm să simplificăm designul de mai sus, eliminând motoarele fără perii și înlocuindu-l cu motoare periate și, prin urmare, făcând posibilă scăparea complexului Modulul circuitului driverului BLDC .
Deoarece detaliile de construcție mecanică ale quadcopterului sunt deja discutate mai sus pe larg, ne vom ocupa doar de secțiunea de proiectare a circuitului și vom afla cum poate fi construită pentru a zbura cel mai simplu circuit de dronă propus.
Așa cum am menționat mai devreme, acest quadcopter simplu necesită doar modulele de bază de telecomandă RF, așa cum se arată în imaginea de mai jos:

Va trebui sa cumpărați aceste module RF de la orice magazin online sau de la distribuitorul local de rezervă electronic:
În afară de cele menționate mai sus Module telecomenzi RF De asemenea, vor fi necesare 4 motoare periate cu magnet permanent, care formează de fapt inima mașinii cu drone. Ar putea fi așa cum este specificat în următoarea imagine cu descrierile date sau orice alt similar, conform specificațiilor necesare pentru utilizator:

Specificații electrice ale motorului:
- 6V = tensiune de funcționare (vârf 12V)
- 200mA = curent de funcționare
- 10.000 = RPM
Lista de componente
- 1K, 10K 1/4 watt = 1 fiecare
- 1uF / 25V Condensator = 1 nr
- Presetare 10K sau 5K = 1 nr
- Rx = rezistor bobinat cu fir de 5 wați, valoare care trebuie confirmată prin experimentare.
- IC 555 = 1 nr
- 1N4148 Diode = 2nos
- IRF9540 Mosfet = 1 nr
- Motor 6V tip periat = 4nos
- Firuri flexibile, lipire, flux etc.
- PCB de uz general pentru asamblarea pieselor de mai sus
- Modul de telecomandă cu 4 canale RF, așa cum se arată în imaginile relevante.
- Canale din aluminiu, șuruburi, piulițe, plăci etc. așa cum se explică în articol.
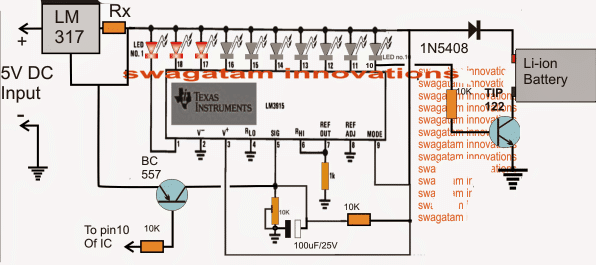
- Bateria așa cum se arată mai jos:

Cum se configurează receptorul de telecomandă cu motoare
Înainte de a înțelege cum să configurați receptorul telecomenzii cu motoarele quadcopter, ar fi important să aflați cum se presupune că turațiile motorului trebuie ajustate sau aliniate pentru a genera mișcările necesare la stânga, dreapta, înainte, înapoi.
În principal, există două moduri în care un quadcopter poate fi activat pentru a se deplasa, care se află în modurile „+” și „x”. În proiectarea noastră folosim modul de mișcare de bază „+” pentru drona noastră, așa cum este indicat în următoarea diagramă:

Referindu-ne la diagrama de mai sus, ne dăm seama că trebuie pur și simplu să creștem în mod corespunzător viteza motoarelor relevante pentru executarea manevrelor direcționale dorite pe dronă.
Această creștere a vitezei poate fi pusă în aplicare prin configurarea releelor de telecomandă conform următoarei scheme de cablare. În diagrama de mai jos putem vedea un Circuit IC 555 PWM conectat cu cele 4 relee ale modulului receptor de telecomandă al celor 6 relee (1 releu fiind neutilizat și ar putea fi pur și simplu îndepărtat pentru a reduce spațiul și greutatea).
Reglarea PWM
După cum se poate observa în diagramă, alimentarea PWM este conectată cu toate contactele N / C ale releelor, ceea ce implică faptul că în mod normal quadcopterul ar fi planat prin această alimentare PWM uniformă și egală, al cărei ciclu de funcționare poate fi ajustat inițial astfel încât quadcopterul este capabil să atingă o cantitate specificată corectă de împingere și altitudine.
Acest lucru poate fi experimentat prin ajustarea adecvată a vasului PWM afișat.
Cum se configurează contactele de releu
Contactele N / O ale releelor pot fi văzute prin cablu direct cu sursa pozitivă, deci ori de câte ori este apăsat un buton relevant pe receptorul emițătorului la distanță, releul corespunzător este activat în modulul receptor, care la rândul său permite motorului relevant să obțină alimentarea completă de 12V de la baterie.
Operația de mai sus permite motorului activat să câștige mai multă viteză decât restul motoarelor, ceea ce permite quadcopterului să se deplaseze în direcția prevăzută.
De îndată ce butonul de la distanță este eliberat, drona se oprește instantaneu și continuă să plutească în modul constant.
În mod identic, alte mișcări direcționale pot fi realizate prin simpla apăsare a celorlalte butoane atribuite, pe receptorul de la distanță.
Releul cel mai de sus este pentru a asigura o aterizare în siguranță a mașinii, acest lucru se face prin adăugarea unui rezistor de cădere curent în serie cu contactul N / O al releului prezentat.
Această valoare a rezistorului trebuie calculată cu o anumită experimentare, astfel încât quadcopterul să se deplaseze în jurul valorii de câțiva picioare deasupra solului ori de câte ori acest rezistor este trecut prin releu atașat.
Diagrama circuitului

Releele afișate fac parte din receptorul modulului RF, ale cărui contacte sunt inițial neconectate (necompletat în mod implicit) și trebuie să fie conectate conform indicațiilor din diagrama de mai sus.
Receptorul de la distanță RF ar trebui să fie instalat în interiorul quadcopterului și releele sale sunt conectate la motoarele și bateria corespunzătoare, conform schemei de mai sus.
Puteți vedea câțiva conectori (de culoare verde) care pot adăuga inutil greutate pe dronă. Puteți să le eliminați pe toate pentru a reduce greutatea și să conectați firele relevante direct la PCB prin lipire.
Cum se mișcă drona:
Așa cum s-a explicat în discuția de mai sus, când este apăsat un anumit buton de la distanță, acesta acționează releul corespunzător al modulului quadcopter, determinând mișcarea mai rapidă a motorului relevant.
La rândul său, această operație forțează mașina să se deplaseze în direcția opusă motorului care este comutat să se rotească la turația mai rapidă.
Astfel, de exemplu, creșterea vitezei motorului sud face ca mașina să se deplaseze spre nord, creșterea motorului nord face ca acesta să se deplaseze spre sud, în mod similar creșterea vitezei motorului estic îl face să se deplaseze spre vest și invers.
Interesant este că mărirea motoarelor sud / est permite quadcopterului să se deplaseze spre nord / vest opus, care este în modul diagonală ... și așa mai departe.
Pro și dezavantaje ale circuitului de telecomandă Qaudcopter simplu explicat mai sus.
Pro
- Ieftin și ușor de construit chiar și de un pasionat relativ nou.
- Nu necesită operații de joystick complexe.
- Poate fi controlat folosind un singur modul de telecomandă cu 6 canale
Contra
- Mai puțin eficientă în ceea ce privește backupul bateriei datorită implicării motoarelor periate
- Viteza direcțională este constantă și nu poate fi variată prin intermediul telecomenzii
- Este posibil ca manevrele să nu fie netede, mai degrabă puțin sacadate în timp ce comutați butoanele.
Precedent: Rezistența de detectare a forței a fost explicată Următorul: Divizor de tensiune capacitiv