În această postare investigăm ce este un motor BLDC și ulterior aflăm despre proiectarea unui circuit de driver BLDC fără senzor.
Ventilatoare CPU BLDC
Ați văzut acele ventilatoare în mișcare rapidă în procesoare, stabilizatoare de tensiune, DVD playere și alte echipamente similare, care funcționează cu cea mai mare eficiență, consumând spațiu minim, curent și totuși sunt capabile să livreze operațiunile importante așa cum este stipulat pentru echipamentul respectiv?
Da, acestea sunt toate versiunile moderne ale ventilatoarelor BLDC sau ale motoarelor DC fără perii, care sunt mult superioare vechilor motoare tradiționale periate.

Imagine oferită de: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Cu toate acestea, un motor BLDC va necesita un circuit sofer sofisticat și da, toate aceste ventilatoare CPU conțin aceste module de driver încorporate, deși acestea par ușor de operat folosind un DC obișnuit, intern sistemul este deja echipat cu un circuit inteligent.
Driver de motor BLDC
Aici vom afla despre un astfel de circuit inteligent al driverului de motor BLDC, folosind un singur cip DRV10963 pentru conducerea oricărui motor BLDC mic cu o eficiență incredibilă, iar mai târziu, într-unul din articolele viitoare, vom vedea cum acest circuit IC poate fi actualizat pentru a conduce chiar și puternicele BLDC de mare curent precum cele care sunt utilizat în quadcopters.
Dar înainte de aceasta, ar fi interesant să aflăm puțin despre motoarele BLDC.
Diferența dintre motoarele DC periate și fără perii
Diferența dintre un motor periat și un motor fără perii și rata de eficiență este destul de evidentă.
Deoarece motoarele periate au armătura înfășurată în mișcare între magneți, trebuie să folosească „perii” (contacte de frecare) astfel încât bornele bobinei în mișcare să poată primi tensiunea de alimentare în mod constant fără a fi nevoie să ajungă singure la sursa de alimentare, ceea ce altfel ar face ca lucrând imposibil și punând în pericol operațiunile.
Într-un motor fără perii, bobina sau înfășurarea nu se mișcă niciodată și este constantă, aici rotorul poartă un set de magneți permanenți și se rotește sub influența fluxurilor magnetice ale înfășurării înconjurătoare.
Deoarece magnetul este liber de toate problemele și este capabil să funcționeze fără a implica terminale pentru a gestiona sau a primi energie, acesta poate merge fără efort, rotindu-se cu o viteză rapidă și practic la un nivel fără zgomot.
Dar există o captură aici. Pentru a face ca un electromagnet să răspundă la fluxurile unui magnet permanent, trebuie să existe o schimbare constantă a fazei magnetice sau a polilor, astfel încât cei doi omologi să poată reacționa constant și să treacă printr-o forță opusă eliberând astfel forța de torsiune necesară peste rotor și executați rotația cu cuplul rezultat.
Într-un motor cu perii, acest lucru devine mai ușor datorită naturii de auto-reglare a bobinei de armătură, care este capabilă să se rotească și să creeze o forță magnetică opusă autosustenabilă și să se rotească în continuare fără a fi nevoie de impulsuri sau prelucrări externe.
Cu toate acestea, într-un BLDC, aceasta devine o problemă, deoarece rotorul magnetic rămâne „fără idei” și necesită o comandă magnetică calculată de la înfășurare pentru a se roti într-un mod semnificativ și nu într-un mod întâmplător.
Tocmai de aceea, toate motoarele BLDC necesită în mod obligatoriu un circuit de comandă a motorului pentru comanda celor trei seturi distincte de înfășurare din interiorul motorului.
Astfel, toate BLDC sunt în esență motoare trifazate și necesită în mod obligatoriu 3 faze pentru a produce cuplul de rotație pe rotor.
Ce fac driverele BLDC fără senzor
Circuitul driverului fără senzor BLDC electrizează pur și simplu cele 3 seturi de înfășurare într-o manieră secvențială astfel încât rotorul magnetic să poată trece printr-o forță opusă consistentă, permițând motorului să realizeze un cuplu și o forță de rotație susținute.
Dar această alimentare secvențială a înfășurării BLDC de către circuit nu poate fi setată doar în mod aleatoriu, trebuie să fie în tandem sau ca răspuns la poziția de rotație a magnetului rotorului, altfel implementarea ar putea să nu funcționeze și putem asista la arborele motorului (rotorul ) rotindu-se la întâmplare, adică zvâcnind între sensul acelor de ceasornic și cel antiorar fără rotație sensibilă.
De ce sunt folosiți senzorii în motoarele BLDC
Prin urmare, introducem senzori poziționați în multe variante de motoare BLDC, acești senzori (de obicei senzori cu efect Hall) „înțeleg” poziția schimbătoare a polilor magnetici ai magnetului rotorului, instruim circuitul procesorului atașat să electrizeze înfășurarea corespunzătoare și să execute o mișcare de rotație cu un cuplu optim.
Senzorii de efect Hall sunt efectiv folosiți în majoritatea motoarelor BLDC, care au dimensiuni relativ mai mari, dar pentru motoarele mai mici, cum ar fi ventilatoarele CPU, unitățile CPU, DVD playere, în ventilatoarele mici de evacuare, pentru motoarele utilizate în quadcoptere, senzorii de efect Hall pot deveni inadecvate și, prin urmare, este implementată o abordare alternativă mai puțin senzor.
Aceasta implică exploatarea electricității electromagnetice inerente a înfășurării, care este luată ca sursă de referință pentru procesarea și electrificarea seturilor relevante de înfășurare și executarea cuplului de rotație.

Simularea unei mișcări de rotor BLDC
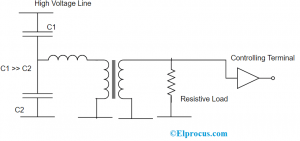
În simularea brută de mai sus putem vizualiza modul în care EMF-ul eliberat este luat ca referință și utilizat pentru producerea impulsurilor de secvențiere pentru seturile ulterioare de înfășurare, impunând un cuplu rotativ pe rotorul central cu magnet permanent. Simularea s-ar putea să nu fie replicarea exactă, cu toate acestea oferă o idee aproximativă a principiului de funcționare.
Este interesant de observat că pulsul este comutat atunci când N / S al magnetului se află exact în centrul miezului de înfășurare, ceea ce permite înfășurării fie să se energizeze ca N sau S, în funcție de polaritatea impulsului și să producă o atragere și respingere forța asupra magneților N / S, generând astfel cuplul necesar la nivelul maxim posibil.
Și acest lucru la rândul său devine posibil datorită EMF din spate eliberată prin comutarea înfășurării anterioare.
Discuția de mai sus clarifică funcționarea unui motor cu BLDC mai puțin senzor, acum să învățăm cum un circuit specific tratează executarea complexă de mai sus a unei comutări trifazate
Driver BLDC DRV10963
După câteva Google-uri, am găsit acest circuit de driver BLDC fără senzori folosind un singur cip DRV10963 care folosește o cantitate neglijabilă de piese în configurație și totuși este capabil să implementeze o procesare sofisticată pentru acțiunile intenționate.
DRV10963 este un cip de ultimă generație, conceput special pentru a acționa motoare fără senzori BLDC, anticipând doar EMF din spate din înfășurarea motorului și oferind o comandă precisă asupra înfășurării și realizând un cuplu de rotație optim peste rotor.
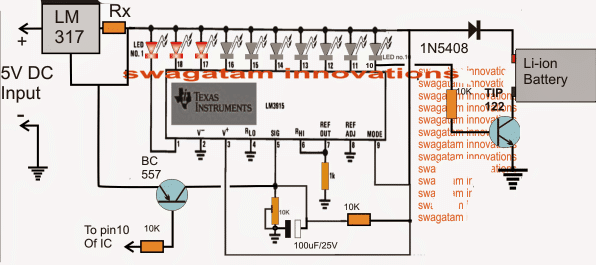
Diagrama circuitului

Imaginea de mai sus arată aspectul simplu al circuitului care aparent nu include altceva decât IC-ul în sine.
Diferitele pinouts sunt alocate pentru îndeplinirea funcțiilor specificate, cum ar fi controlul vitezei PWM al motorului, controlul direcției, etc. prin simpla alimentare a pinouturilor relevante cu datele specificate de la o sursă externă.
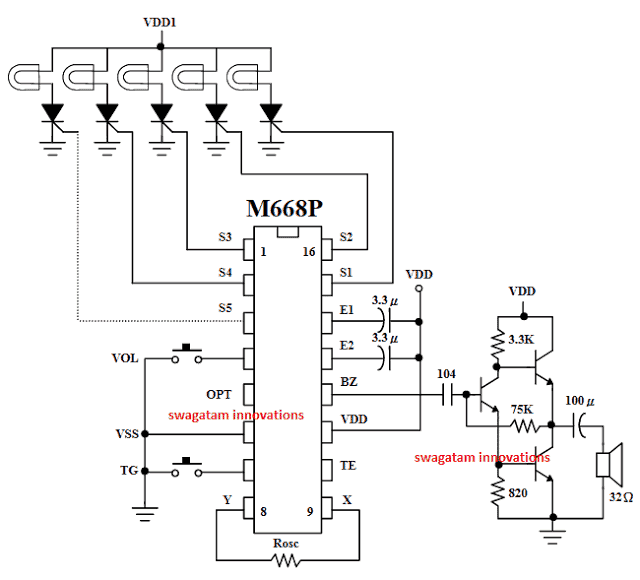
Următoarea imagine arată pachetul cipului, care arată ca un IC DIL cu 10 pini, diferitele funcții de pinout ale acestuia pot fi studiate din datele furnizate în diagramă:

Referindu-ne la schema circuitului driverului BLDC fără senzor propus așa cum este prezentat în articolul anterior și, de asemenea, imaginea cipului de mai sus, detaliile pinouts pot fi înțelese după cum urmează:
Detalii IC Pinout
FG = Este pinul indicatorului de viteză al motorului (ieșire), care este montat într-un mod de colector deschis cu un BJT intern.
Colectorul deschis înseamnă că ieșirea la acest pinout va produce PWM-uri negative prin logici de scufundare pe colectorul deschis și la sol, astfel pentru a obține o citire validă, utilizatorul va trebui să conecteze un rezistor de tracțiune peste acest colector deschis și alimentarea pozitivă (5V ) pentru realizarea indicației de viteză la acest pinout.
FGS = Este intrarea selectorului indicatorului de viteză, ceea ce înseamnă că aici poate fi introdusă o logică mare sau scăzută pentru pornirea / oprirea pinului indicator FG.
Vcc = Alimentarea pozitivă către CI pentru a-i permite să funcționeze nu trebuie să depășească 5V.
W, U și V sunt ieșirile trifazate pentru motorul BLDC care ar trebui să fie acționat prin intermediul acestui IC. Aceasta acționează și ca intrări pentru detectarea impulsurilor EMF ale motorului pentru comutarea sincronizată necesară a bobinelor motorului.
GND = Se referă la pinout negativ de alimentare al CI în raport cu pinul Vdd.
FR = Ajută la selectarea sau comanda direcției motorului și poate fi schimbat dinamic oricând după ce sistemul este alimentat, pur și simplu prin introducerea unei logici externe ridicate sau logice scăzute.
PWM = Semnifică intrarea de control PWM de la un generator de formă de undă PWM extern.
Această intrare PWM poate fi variabilă pentru implementarea controlului de viteză dorit al motorului BLDC conectat.
Spațiul punctat din centrul cipului indică tamponul termic, care poate fi prins sau apăsat cu un radiator pentru a scufunda posibila generație de căldură pe cip în timp ce este utilizat cu un motor BLDC încărcat.
Discuția de mai sus precizează pinout-ul sau detaliile de conexiune ale cipului driverului de motor BLDC fără senzor DRV10963, acum să analizăm în detaliu configurația internă și funcționarea cipului cu ajutorul următoarelor puncte:
Descrierea dispozitivului
DRV10963 este un operator de motor electric trifazat fără senzor, cu MOSFET-uri de putere încorporate (trifazat cu punte H). Este adaptat pentru productivitate mai mare, zgomot redus și funcții de acționare a motorului cu număr secundar minim de materiale. Sistemul exclusiv de gestionare sinusoidală fără ferestre-Iess la 180 ° oferă o eficiență de deplasare a motorului fără zgomot.
DRV10963 alcătuit dintr-o funcționalitate inteligentă de detectare a blocării, combinat cu circuite de securitate suplimentare încorporate pentru a obține performanțe securizate. DRV10963 poate fi găsit într-un ambalaj USON cu 10 pini eficient din punct de vedere termic, cu un covor termic neacoperit.
Cum funcționează IC
Produsul DRV10963 este un operator motor fără senzor trifazat cu MOSFET-uri de putere infuzată, este
creat special pentru performanțe superioare, rezonanță redusă și funcții de acționare a motorului cu număr minim de piese superficiale.
Planul principal de control sinusoidal fără fereastră fără senzor la 180 ° prezintă funcționarea fără zgomot a motorului prin menținerea cuplului nominal al cuplului stimulat electric. La inițializare, dispozitivul DRV10963 va roti motorul în cursul specificat prin pinul de intrare FR.
Cipul DRV10963 va funcționa cu un motor BLDC trifazat, utilizând un plan de control sinusoidal.
Semnificația tensiunilor de fază sinusoidale utilizate depinde de ciclul de funcționare al pinului PWM. În timp ce motorul se mișcă, IC-ul DRV10963 furnizează datele de viteză la pinul FG.
Unitatea DRV10963 este formată dintr-o capacitate de detectare a blocării inteligente. În cazul în care motorul este afectat de o presiune străină, programul va identifica problema blocării și va lua măsuri de protejare de la sine, împreună cu motorul.
Procedura particulară a circuitului de detectare a blocării este descrisă în detaliu în Detectarea blocării. DRV10963 IC include, de asemenea, mai multe circuite de siguranță încorporate, de exemplu protecție la supracurent, protecție la supratensiune, protecție sub tensiune și protecție la temperatură.
Explicație caracteristică
Intrare și control al vitezei
DRV10963 prezintă ieșiri PWM trifazate 25-kl-lz care pot avea un procent standard de forme de undă sinusoidale de la fază la fază. În cazul în care se determină un ciclu în ceea ce privește solul, forma de undă detectată este probabil o sinusoidă protejată PWM combinată cu armonici de ordinul III, așa cum se arată în Figura 2.

Această strategie de codificare eficientizează specificațiile driverului pentru motivul că probabil va exista adesea o ieșire dintr-o fază care ar putea fi egală cu zero.
Amplitudinea rezultatului variază în funcție de tensiunea de alimentare (VCC) și de ciclul de funcționare obligatoriu PWM (PWM), astfel cum este definit în ecuația 1 și evidențiat în figura 3. Amplitudinea optimă este implementată odată ce ciclul de funcționare PWM instruit este de 100 PERCENT.
Vphpk = PWMdc>

Viteza motorului este reglată nu direct prin utilizarea comenzii PWM pentru a regla amplitudinea tensiunilor de fază care se întâmplă să fie utilizate pentru motor.
Ciclul de funcționare al intrării PWM este modificat într-o cantitate digitală de 9 biți (de la 0 la 511).
Rezoluția de reglementare este 1/512 == 0,2%. Analizorul ciclului de funcționare facilitează o operațiune de schimb de ordine inițială între ciclul de sarcină de intrare și cifra digitală de 9 biți.
Acest lucru este evidențiat în Figura 4, în care r = 80 ms.

Performanța de schimb între ciclul de lucru comandat PWM împreună cu amplitudinea maximă a ieșirii este variabilă în dispozitivul DRV10963.
Amplitudinea maximă rezultată este discutată de ecuația 1 atunci când comanda PWM> ciclul minim de funcționare. Cel mai scăzut ciclu de funcționare este adesea stabilit la 13%, 10%, 5% sau fără restricții prin setarea OTP (MINOP_DC1: 0).
Tabelul 1 prezintă configurațiile recomandate pentru ciclul minim de funcționare.
Ori de câte ori ciclul de funcționare instruit PWM este mai mic decât cel mai scăzut ciclu de funcționare și mai mult de 1,5%, ieșirea va fi reglementată la ciclul de funcționare minim de funcționare. De fiecare dată când ciclul de funcționare a intrării este sub 1,5%, este posibil ca dispozitivul DRV10963 să nu ruleze ieșirea și să fie trimis în modul de așteptare.
Acest lucru poate fi ilustrat în Figura 6.

Configurări de rotație
DRV10963 va porni motorul printr-o tehnică care este detaliată în figura 7.

Graficul de inițializare a motorului constă din alternative configurabile ale dispozitivului pentru limita de comutare a buclei deschise pentru închiderea buclei (HOW.), Timpul de aliniere (TAHQH) și viteza de accelerare (RACE).
Pentru a alinia rotorul la logica de comutare, DRV10963 execută un ciclu de funcționare x% pe fazele V și W, controlând în același timp faza U la GND.
Acest scenariu este susținut pentru secunde TAIign. Semnificația x% este identificată prin tensiunea VCC (așa cum se arată în tabelul 2) pentru a menține un cuplu de rotație amplu la diferite tensiuni de alimentare diferite.
Pe măsură ce secvența de aliniere se realizează, motorul este forțat să accelereze punând tensiuni de fază sinusoidale cu niveluri de vârf așa cum este ilustrat în Tabelul 2 și creșterea cu ajutorul intervalului de comutare la o rată de expansiune reprezentată de RACE până când nivelul de comutare crește la Hom ., Hz.
Îndată ce se ajunge la această limită, DRV‘l0963 convertește în modul buclă închisă prin care progresia unității de comutație este recunoscută de algoritmul de control încorporat în timp ce tensiunea utilizată este identificată de intrarea în ciclu de lucru obligatoriu PWM.
Bucla deschisă pentru a închide limita de comutare a buclei (Hom), timpul de aliniere (TAHQH) și viteza de accelerare (RACE) sunt configurabile prin configurații OTP.
Selecția pragului de transfer (HOW) este de obicei aprobată prin evaluare de încercare și eroare. Obiectivul ar fi să preferăm o toleranță de transfer care ar putea fi la fel de puțin posibilă și să permită motorului să treacă fără efort și fidelitate între accelerația în buclă deschisă și accelerația în buclă închisă.
Motoarele cu turație crescută în mod obișnuit (turația maximă) necesită o toleranță de transfer superioară datorită faptului că motoarele cu turație ridicată conțin Kt scăzut, deci BEMF mai accesibil.
Tabelul 3 demonstrează preferințele configurabile pentru toleranța de transfer. Cea mai mare viteză în Hz electrică este dovedită ca o referință pentru a ajuta la alegerea vitezei de transfer dorite pentru o transmisie specifică.

Alegerea timpului de aliniere (TAHQH) și a ratei de accelerare (RACE) poate fi chiar condiționată de examinarea încercărilor și erorilor.
Motoarele cu inerție mai mare necesită în mod normal un timp de aliniere extins și o viteză mai lentă de creștere, spre deosebire de motoarele cu inerție scăzută care solicită în mod obișnuit un timp de aliniere mai scurt împreună cu un procent de accelerare mai rapid. Compensările programului trebuie implementate pentru a valorifica stabilitatea lansării, spre deosebire de perioada de rotație.
TI susține începând cu luarea în considerare a configurațiilor mai puțin intense (RACE mai lent și Tmign semnificativ) pentru a compromite timpul de cuplu în susținerea ratei maxime de îndeplinire.
De îndată ce echipamentul este confirmat că funcționează conștiincios, configurațiile suplimentare puternice (RACC mai mare și TAHQH mai mic) pot fi utilizate pentru a diminua momentul de revenire și, în același timp, să țină cont de rata de îndeplinire.
Tabelul 4 prezintă setările configurabile pentru TA'g ,, și RACE.

Partea rămasă a explicației privind acest IC BLDC fără senzor este furnizată în această fișă de date originală
Vă rugăm să nu ezitați să comentați pentru a afla mai multe despre detaliile despre circuitul driverului de motor BLDC fără senzori de mai sus
Precedent: Circuit de alimentare cu rucsac cu LED de 12V Următorul: Circuit de telecomandă Quadcopter fără MCU