Odată cu dezvoltarea tehnologiilor în special în tehnologia robotică, roboții sunt predominanți în multe dintre aplicații. Unele dintre acestea sunt de tip foarte riscant și zone periculoase. Aplicațiile militare și de câmp de luptă își dezvoltă acum utilizarea roboților în anumite sarcini cruciale și complicate. Într-unul dintre articolele mele, am descris utilizarea roboților ca spion în operațiuni militare. Acum, dacă este nevoie de apărare vehiculul robotizat sau un atac al robotului? Acolo vine nevoia unui robot încorporat cu un mecanism de atac. Un astfel de exemplu este vehiculul robotizat cu pistol LASER.

Vehicul robot controlat RF cu aranjament cu fascicul laser
Un astfel de robot este utilizat în principal în operațiuni militare și, de asemenea, de către poliția rutieră pentru a detecta viteza vehiculelor în mișcare.
Înainte de a accesa detaliile despre roboții cu arme laser, permiteți-ne să înțelegem rapid LASER-ul ca armă.
Un fascicul LASER (Light Amplification by Stimulation Emission) este o lumină unidirecțională puternic focalizată spre deosebire de cea de la un bec simplu. Se compune din jgheaburi și creste sincronizate, adică undele nu interferează între ele. Aceasta produce o lumină puternic focalizată, cu o putere foarte mare, de ordinul a 1000 până la 1 milion de ori mai mare decât o bec tipic. Este un dispozitiv care controlează emisia și absorbția fotonilor prin pomparea unor cantități suficiente de energie. În aceasta, sursa fotonilor este amplificată într-un fascicul de lumină. Lungimea de undă a acestor lasere este variată în diferite spectre, cum ar fi vizibile, infraroșii și ultraviolete.
Principiul din spatele LASER-ului se învârte în jurul a trei lucruri: absorbția, emisia spontană și emisia stimulată. O cantitate adecvată de energie din foton interacționează cu atomul, determinând atomul să sară de la starea de energie mai mică la starea de energie mai mare. Acest atom revine la starea de energie inferioară prin emiterea unui foton numit emisie spontană. În emisie stimulată este eliberarea de energie din atom prin mijloace artificiale. deci fotonul interacționează cu atomul excitat, are aceeași energie și polarizare ca fotonul incident.
Acum, să aruncăm o privire asupra componentelor hardware ale robotului
- Baza: Baza unui astfel de robot poate fi orice corp cubic cu roți atașate pentru mișcarea sa.
- Motor DC: Robotul este format din două motoare de curent continuu acționate de driverele motorului și asigură mișcarea necesară robotului.
- Unitatea de comandă: Mișcarea robotului este controlată folosind un modul de comunicație RF. Transmițătorul constă din butoane, microcontrolere, un decodor și un transmițător RF, în timp ce unitatea receptor încorporată în robot constă dintr-un codificator și un modul receptor RF pentru a controla mișcare robotică .
- Un pistol LASER: O pistol LASER este montat pe robot care îndeplinește sarcina principală a robotului.
O scurtă privire asupra robotului care funcționează
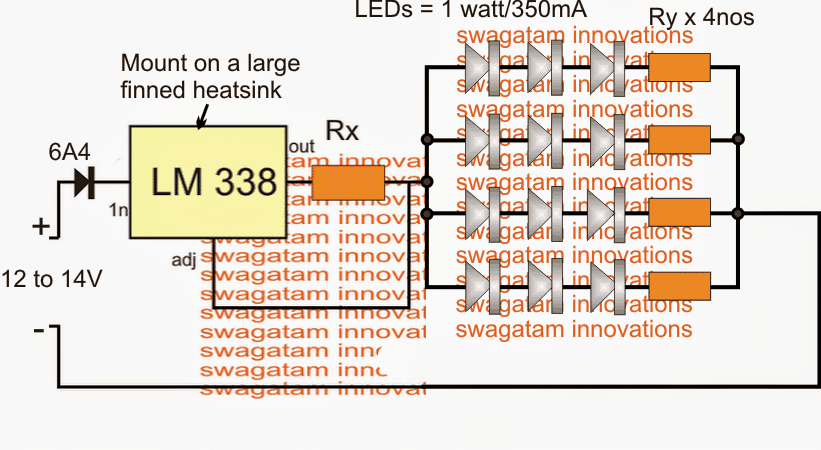
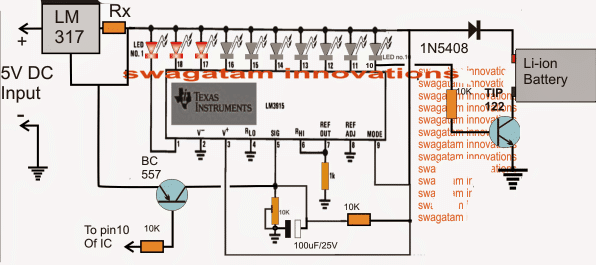
Robotul, în timp ce se deplasează în direcția necesară, trage un fascicul puternic de lumină din arma LASER care poate dăuna țintei sau poate produce doar un punct pentru a detecta ținta. LASERUL trebuie să fie condus de unele surse de energie. Într-un proiect simplu de prototip care utilizează un stilou LASER de bază, dispozitivul este acționat de un tranzistor care acționează ca un comutator. Tranzistorul primește semnalul logic scăzut de la microcontroler și este în stare oprită, făcând modulul LASER conectat direct la sursa de alimentare de 5 V.

Pistol cu laser acționat de tranzistor care funcționează ca invertor
Controlul robotului
Pentru a controla mișcarea robotului, funcționarea motoarelor trebuie controlată. Acest lucru se poate face folosind o operație controlată de RF a driverelor de motor. Comenzile sunt transmise folosind un transmițător RF la o anumită unitate de distanță de aproximativ 200 de metri și primite de receptorul RF pentru a acționa motoarele.
Unitatea emițătoare constă din mai multe butoane care acționează ca comutatoare de comandă pentru a muta robotul în orice direcție dorită. Butoanele sunt interfațate cu microcontrolerul, care este programat să trimită date în formă paralelă pe baza intrării butonului, către codificator. Codificatorul convertește aceste date paralele în formă serială și aceste date seriale sunt transmise utilizând modulul transmițător RF printr-o antenă.

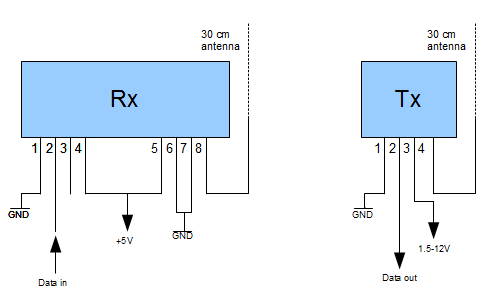
Diagrama bloc care arată secțiunea emițător
Unitatea receptoare este formată dintr-un modul receptor RF care primește semnalul modulat și îl demodulează. Decodorul primește semnalul demodulat în formă serială și îl convertește în formă paralelă. Microcontrolerul primește semnalele și controlează driverul motorului în consecință. Driverul de motor utilizat în LM293D care poate controla 2 motoare la un moment dat.

Diagrama bloc care arată secțiunea receptorului
Astfel, folosind comunicarea RF putem controla robotul.
În descrierile de mai sus, am dat o scurtă idee despre un prototip simplu de vehicul robotizat cu fascicul LASER. În aplicațiile din viața reală, sistemele de comunicații cu rază lungă de acțiune, cum ar fi GSM sau DTMF, sunt utilizate în mod normal pentru a controla robotul din locuri îndepărtate.
3 aplicații ale vehiculului robotizat cu pistol laser:
- Detectarea țintei : Vehiculul robotizat poate folosi fasciculul LASER pentru a provoca un punct pe țintă, astfel încât să fie ușor vizibil și să poată fi vizat. Un exemplu este LASER-ul Air Borne.
- Distrugerea țintei : Puternic Fascicul cu laser de ordinul frecvenței 95GHz poate provoca o senzație de arsură în corpul uman, deoarece pătrunde în piele cu 1/64ade un centimetru și energia fasciculului poate încălzi moleculele de apă din corp. Un exemplu este Active Denial System dezvoltat de SUA.
- Finder Range Target și detectarea vitezei : Fascicul LASER de la vehiculul robotizat poate fi folosit pentru a găsi raza de acțiune a țintei prin principiul reflectării luminii LASER și, de asemenea, viteza țintei poate fi calculată după ce putem obține raza de acțiune.
Deci, acum avem o scurtă idee despre roboții care au folosit un detector și un distrugător de ținte. Are vreun alt folos pentru publicul normal, în afară doar de militari? Gândește și răspunde.