Postul explică un obstacol simplu care evită circuitul robotului fără microcontroler și fără a utiliza circuite speciale de driver de motor sau circuite integrate. Ideea a fost cerută de domnul Faiyyaz
Design-ul
Practic este sub forma unui vehicul în mișcare care este capabil să detecteze și să evite potențialele obstacole pe calea sa și să-și schimbe direcția în mod corespunzător, astfel încât mișcarea să rămână neîntreruptă, simplă!
Operația este astfel automată fără intervenție manuală sau umană.
Ideea prezentată a unui robot care să evite obstacolele fără microcontroler, așa cum sugerează și numele, nu folosește un microcontroler și, prin urmare, este extrem de simplu de construit și adecvată oricărui nou hobby.
În timp ce proiectam circuitul, mi-am dat seama că, pentru a pune în aplicare principiul, ar fi necesare cel puțin câteva module de senzori de obstacole, deoarece utilizarea unui singur modul poate provoca mișcarea neregulată a motorului și nu poate ajuta la o deviere lină sau rotirea vehiculului către o cale liberă.
Motorul vehiculului configurat este destul de similar cu mașină de jucărie cu telecomandă despre care discutasem într-una din postările anterioare.
Următoarea diagramă reprezintă unul dintre modulele sistemului și, prin urmare, două sau o pereche de astfel de module ar fi necesare în partea dreaptă și în partea stângă a vehiculului.
Ideea este simplă și funcționează fără microcontroler și fără circuite integrate speciale pentru driverul de motor. Asta înseamnă că îl puteți face fără niciun fel de codificare și fără a utiliza niciun fel de driver complex de motor IC ..... iar circuitul vă permite să utilizați orice motor DC indiferent de puterea sa, astfel încât chiar și vehiculele care evită obstacole de mare putere ar putea fi realizate folosind acest circuit care sunt utilizate în mod normal în mall-uri și puncte de vânzare similare.
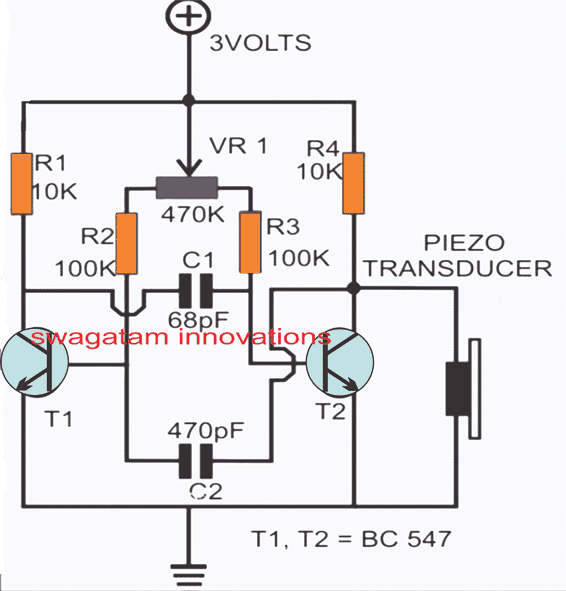
Diagrama circuitului

Acum, să încercăm să înțelegem circuitul de mai sus cu ajutorul următoarei explicații:
Cum functioneaza
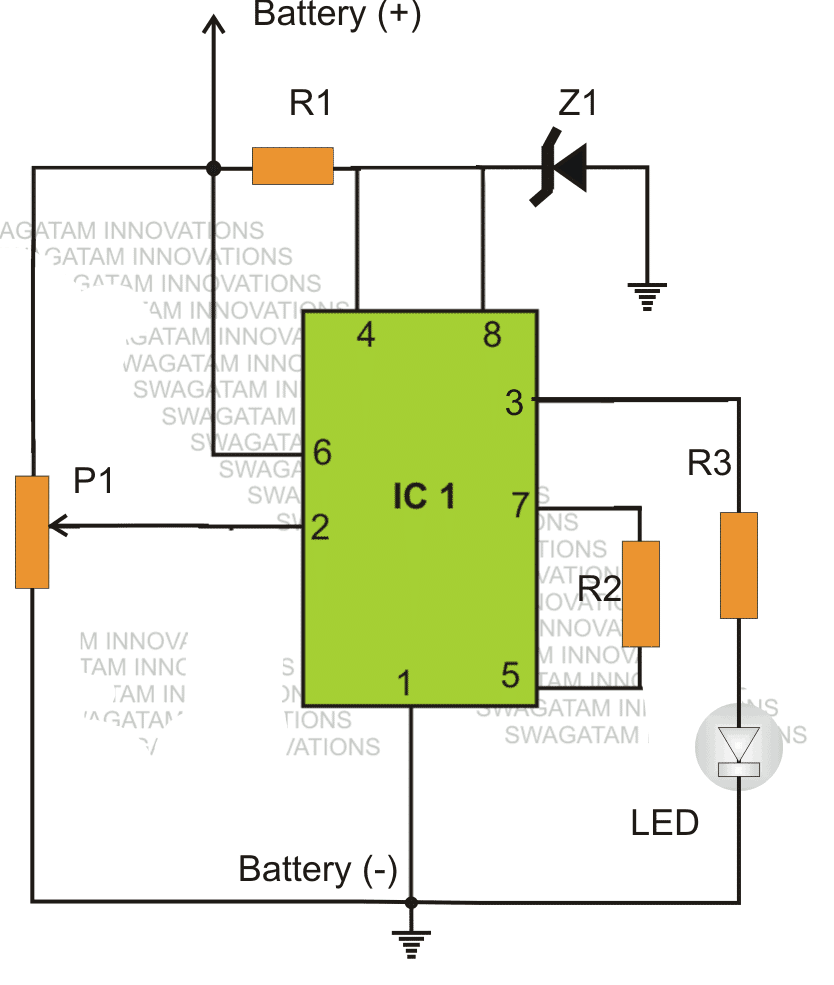
IC 555 este configurat ca un transmițător IR și este setat să genereze o frecvență constantă de 38 kHz, în timp ce circuitul transistorizat alăturat este configurat ca stadiu receptor sau etapă senzor IR.
Să presupunem că este modulul lateral drept și să presupunem că acest modul se întâmplă să fie primul care detectează un obstacol în cale.
Prin urmare, imediat ce este detectat un obstacol, frecvența de 38kHz generată de 555 IC este reflectată către senzorul circuitului receptor alăturat.
Receptorul activează instantaneu tranzistoarele asociate astfel încât tranzistorul final al driverului să fie inhibat de la conducere.
Acum, motorul controlat de acest tranzistor ar trebui să fie situat pe partea stângă a vehiculului, adică pe partea opusă a acestui modul ... în mod similar, motorul situat pe partea dreaptă este de fapt controlat de modulul din partea stângă. .
În consecință, atunci când modulul detector de obstacole din partea dreaptă de mai sus se activează, acesta oprește motorul din partea stângă, în timp ce motorul din partea dreaptă este permis să se miște normal.
Această situație face ca vehiculul să fie forțat să ia o deviere pe partea stângă ... ceea ce înseamnă că acum modulul din stânga presupus începe să primească semnale de obstacole și mai puternice și continuă să forțeze vehiculul să procedeze mai greu la deviația în curs până când a evitat complet obstacolul . Modulul încetează acum să primească semnalele de obstacol și vehiculul începe să avanseze normal pe noua sa cale.
În timp ce se efectuează devierea de mai sus, modulul din stânga este forțat să devină din ce în ce mai izolat și mai departe de obstacol, astfel încât să nu aibă ocazia să intervină în procedură și să permită o deviere curată și lină a vehiculului.
Exact aceleași proceduri sunt implementate în cazul în care modulul lateral stâng se întâmplă să simtă obstacolul în fața modulului lateral drept, în care vehiculul este forțat să se deplaseze din ce în ce mai tare spre partea dreaptă.
De asemenea, putem vedea o etapă de circuit „dezactivantă” în modul care este interconectată între modulele din stânga și din partea dreaptă. Această etapă este introdusă în mod intenționat pentru a se asigura că ambele module nu sunt activate niciodată împreună.
Prin urmare, de exemplu, dacă modulul din stânga devine primul care detectează un obstacol, acesta dezactivează imediat modulul din dreapta și inițiază devierea vehiculului din dreapta și invers.
Senzorul IC ar putea fi un seria standard TSOP17XX
Pentru mai multe informații despre senzorul IC de mai sus, puteți afla cum se conectează TSOP1738 IC
Și motorul ar trebui să fie echipat cu cutii de viteze, astfel încât mișcarea să fie menținută inițial la un nivel controlat.
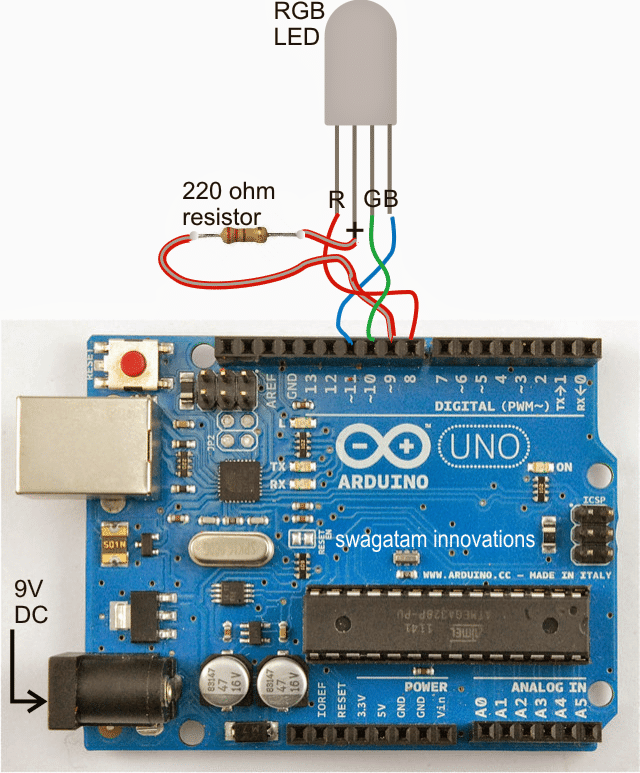
Configurarea roții
Configurarea completă a modulului stânga și dreapta și conexiunile electrice asociate pot fi observate în figura de mai jos:

Actualizați
O mică gândire ne spune că simplul obstacol de mai sus care evită circuitul robotului ar putea fi implementat și prin utilizarea unui singur modul, în locul celor două.
Cu toate acestea, un singur modul ar permite vehiculului să efectueze o deviere unilaterală de fiecare dată când detectează un obstacol, prin urmare sistemul ar putea fi configurat fie pentru a efectua o deviere în sensul acelor de ceasornic, fie în sens invers acelor de ceasornic, în funcție de motorul care este conectat cu circuitul pentru acțiuni.
Exemplul configurat poate fi vizualizat în următoarea imagine:

Cu toate acestea, se pare că există o problemă cu configurarea unui singur motor de mai sus. Dacă presupunem că vehiculul întâlnește un colț unghi drept în partea stângă. Acest lucru va forța vehiculul să continue să se deplaseze în sens invers acelor de ceasornic, până când face o întoarcere în U și începe să se deplaseze înapoi în aceeași direcție de unde pornise. Utilizatorul nu ar aprecia acest lucru.
Precedent: Rezistențe SMD - Introducere și funcționare În continuare: Cum funcționează un accelerometru