În acest post vom afla despre un circuit simplu care permite o funcție de reglare manuală pentru sincronizarea scânteii CDI-ului unei motociclete, fie pentru a obține o aprindere avansată, aprindere întârziată sau pur și simplu o aprindere normală temporizată.
După un studiu cuprinzător cu privire la subiect, am reușit aparent să proiectez acest circuit care poate fi utilizat de orice motociclist pentru a obține o viteză sporită și o eficiență a consumului de combustibil, ajustând timpul de aprindere al motorului vehiculului după cum se dorește, în funcție de viteza sa instantanee.
Timp de aprindere a scânteii
Știm cu toții că sincronizarea scânteii de aprindere generate în interiorul unui motor al vehiculului este crucială în ceea ce privește consumul de combustibil, durata de viață a motorului și viteza vehiculului, scânteile CDI temporizate greșit pot produce un vehicul care funcționează prost și invers.
Timpul de aprindere recomandat pentru scânteia din interiorul camerei de ardere este când pistonul este la aproximativ 10 grade după ce a trecut punctul TDC (Top Dead Center). Bobina pickup este reglată pentru a corespunde acestui lucru și de fiecare dată când pistonul ajunge chiar înainte de TDC, bobina pickup declanșează bobina CDI pentru a declanșa scânteia, denumită BTDC (înainte de punctul mort superior.
Arderea efectuată cu procesul de mai sus produce, în general, o bună funcționare a motorului și emisii.
Cu toate acestea, cele de mai sus funcționează frumos numai atâta timp cât motorul funcționează la o anumită viteză medie recomandată, dar pentru motocicletele proiectate pentru a atinge viteze extraordinare, ideea de mai sus începe să funcționeze defectuos și motocicleta este împiedicată să atingă turațiile mari specificate.
Sincronizarea Spark Time cu viteze variabile
Acest lucru se întâmplă deoarece la viteze mai mari pistonul se mișcă mult mai repede decât o poate anticipa scânteia de aprindere. Deși circuitul CDI inițiază declanșarea corect și încearcă să completeze poziția pistonului, până când scânteia este capabilă să se aprindă la bujie, pistonul a călătorit deja cu mult înaintea TDC, provocând un scenariu de combustie nedorit pentru motor. La rândul său, acest lucru duce la ineficiențe, împiedicând motorul să atingă limitele de viteză mai mari specificate.
Prin urmare, pentru a corecta timpul de aprindere a aprinderii, trebuie să avansăm ușor declanșarea bujiei comandând un declanșator ușor avansat pentru circuitul CDI, iar pentru viteze mai mici, acest lucru trebuie pur și simplu inversat, iar declanșarea trebuie preferabil ușor întârziată pentru permițând o eficiență optimă pentru motorul vehiculului.
Vom discuta toți acești parametri mult mai elaborat într-un alt articol, în acest moment am dori să analizăm metoda care ne-ar permite să realizăm o ajustare manuală a sincronizării scânteii de aprindere, fie pentru a avansa, a întârzia sau a funcționa normal, conform vitezei a motocicletei.
Momentul ridicării poate să nu fie suficient de fiabil
Din discuția de mai sus putem concluziona că declanșatorul bobinei de preluare nu devine exclusiv fiabil pentru motocicletele de mare viteză și că unele mijloace de avansare a semnalului de preluare devin imperative.
În mod normal, acest lucru se face folosind microcontrolere, am încercat să realizez același lucru folosind componente obișnuite, se pare că este un design logic fezabil, deși doar un test practic poate confirma că este ușor de utilizat.

Proiectarea unui procesor electronic CDI Advance Retard
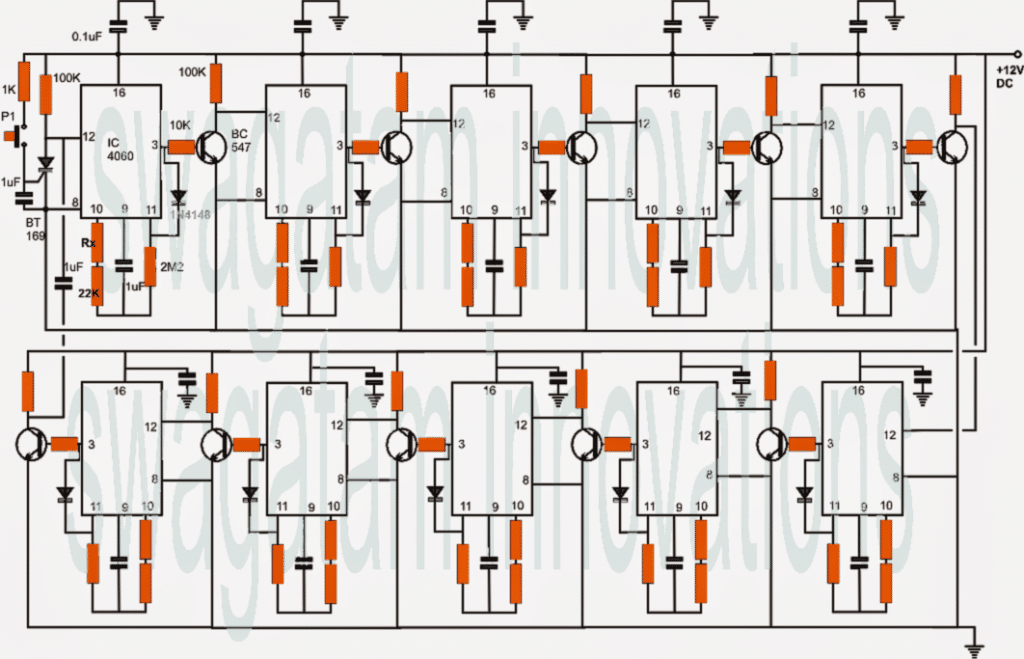
Referindu-ne la designul de mai sus al circuitului propus reglabil al avansului scânteii și al temporizatorului CDI, putem vedea un circuit obișnuit IC 555 și un circuit IC 4017 care sunt montate într-un standard ' Circuit de lumină cu LED-uri 'modul.
IC 555 este setat ca un dispozitiv care produce și alimentează impulsuri de ceas la pinul 14 al IC 4017 care, la rândul său, răspunde la aceste impulsuri și produce o logică înaltă 'sărind' peste pinouturile sale de ieșire începând de la pinul 3 la pinul 11 și apoi înapoi la pinul 3.
Câteva BJT-uri NPN / PNP pot fi văzute în partea stângă a diagramei, acestea sunt poziționate pentru a reseta cele două circuite integrate ca răspuns la semnalele primite de la bobina de preluare a motocicletelor.
Semnalul bobinei de preluare este alimentat la baza NPN-ului, ceea ce solicită CI-urilor să reseteze și să repornească oscilațiile, de fiecare dată când bobina de preluare detectează o revoluție finalizată de către volantul asociat.
Optimizarea frecvenței IC 555
Acum, frecvența IC 555 este ajustată astfel încât, până când bobina de preluare detectează o rotație și resetează IC-urile, IC-ul 555 este capabil să producă aproximativ 9 până la 10 impulsuri, permițând IC 4017 să redea un nivel ridicat până la pinul său # 11 sau cel puțin până la pinout-ul său # 9.
Cele de mai sus pot fi setate pentru rotații corespunzătoare vitezei de ralanti a motocicletei.
Înseamnă că în timpul vitezei de ralanti semnalele bobinei de preluare ar permite ieșirilor 4017 să se deplaseze prin aproape toate pinout-urile până la revenirea la pinul 3.
Cu toate acestea, acum să încercăm să simulăm ce s-ar întâmpla la viteze mai mari.
Răspuns la viteză mai mare a vehiculului
La viteze mai mari, semnalele de preluare ar produce semnale mai rapide decât setarea normală și acest lucru ar împiedica la rândul său IC 555 să genereze cele 10 impulsuri stipulate, așa că acum ar putea fi capabil să genereze aproximativ 7 impulsuri sau 6 impulsuri la o dată fiind viteza mai mare a vehiculului.
La rândul său, acest lucru ar împiedica IC 4017 să permită toate ieșirile sale să fie ridicate, în schimb acum ar fi capabil să conducă doar până la pinul 6 sau pinul 5, după care pickup-ul ar forța IC-ul să se reseteze.
Împărțirea volantului în 10 divizii de avans / întârziere
Din discuția de mai sus putem simula o situație în care, la turații de ralanti, ieșirile IC 4017 împart rotația volantului pickup în 10 diviziuni, în care semnalele de 3 sau 4 pinout inferioare pot fi considerate ca fiind corespunzătoare semnalelor care pot fi care apare chiar înainte de semnalul de declanșare real al bobinei de preluare, în mod similar, logica ridicată a pinului la pinul 2,4,7 ar putea fi simulată ca fiind semnalele care apar imediat după ce declanșarea reală a bobinei de preluare a trecut.
Prin urmare, putem presupune că semnalele de la pin-urile inferioare ale IC 4017 „avansează” semnalele reale de preluare.
De asemenea, deoarece resetarea de la pickup împinge IC 4017 în sus la pinul său # 3, se poate presupune că acest pinout corespunde declanșatorului normal 'recomandat' al pickup-ului .... în timp ce pinouturile care urmează pinul 3, adică pinouts2,4,7 ar putea fi presupus a fi semnalele corespunzătoare semnalelor tardive sau semnalelor „retardate”, în ceea ce privește declanșatoarele reale de preluare.
Cum se configurează circuitul
Pentru aceasta trebuie mai întâi să cunoaștem timpul necesar semnalului de preluare pentru a genera fiecare impuls alternativ.
Să presupunem că îl înregistrați în jur de 100 de milisecunde (o valoare arbitrară), acest lucru ar implica faptul că 555 IC trebuie să producă impulsuri la pinul său # 3 la o rată de 100/9 = 11,11 ms.
Odată ce acest lucru este setat, putem presupune aproximativ că ieșirile de la 4017 produc o logică ridicată pe toate ieșirile sale, care s-ar „retrage” treptat pe măsură ce semnalele de preluare devin din ce în ce mai rapide ca răspuns la viteza vehiculului.
Acest lucru ar induce o logică „ridicată” în retragere pe pinouturile inferioare ale IC 4017, prin urmare, la viteze mai mari, călărețul va avea opțiunea de a recurge manual la seturile inferioare de pini pentru declanșarea bobinei CDI, așa cum se arată în diagramă (a se vedea opțiuni ale comutatorului selector).
În figură putem vedea un comutator selector care poate fi utilizat pentru selectarea declanșatoarelor pinout din IC 4017 IC pentru declanșarea bobinei CDI.
Așa cum s-a explicat mai sus, setul inferior de logici ridicate ale pinout-ului retrogradat, odată selectat, ar permite o declanșare în avans a bobinei CDI și astfel ar permite călărețului să obțină o declanșare automată de reglare automată a bobinei CDI, cu toate acestea, aceasta trebuie selectată numai când vehiculul rulează cu mult peste viteza normală recomandată.
În mod identic, dacă călărețul are în vedere o viteză mai mică pentru vehicul, poate comuta comutatorul pentru selectarea opțiunii de sincronizare „întârziată”, disponibilă peste pinouturile care se află imediat după pinul 3 al IC 4017.
În timpul vitezei normale recomandate, motociclistul poate opta pentru pinul # 3 ca ieșire de declanșare pentru CDI, care ar permite vehiculului să se bucure de o plimbare eficientă la viteza normală dată.
Teoria sincronizării avansului / întârzierii de mai sus a fost inspirată din explicația exprimată în următorul videoclip:
Link-ul video original care poate fi vizionat pe Youtube este prezentat mai jos:
Cum să automatizați conceptul de mai sus
În secțiunea următoare vom învăța metoda de actualizare a conceptului de mai sus la o versiune automată folosind un tahometru și un circuit opamp. Ideea a fost cerută de domnul Mike și proiectată de domnul Abu-Hafss.
Specificatii tehnice
Salutari!
Lucruri interesante aici, în prezent, stabilesc urme pe CAD și aș dori să scriu acest lucru pe niște PCB, dar aș prefera să aleg selecția standardului avansat sau să întârzie la electronică ...
Sunt un pic nou în acest sens, dar simt că aș înțelege destul de bine conceptele în joc ...
întrebarea mea este, există articole pe care le aveți despre automatizarea selecției avansate pe baza RPM-ului motorului? oh și o listă de piese a diferitelor componente ar fi spectaculoase ???
Mulțumesc, Mike
Designul, de Abu-Hafss
Bună Swagatam
Referindu-vă la articolul dvs. despre avans, întârziere aprindere scânteie CDI pentru creșterea eficienței motocicletei de mare viteză , Aș dori să comentez că nu am întâlnit încă nicio situație în care să fie necesară RETARDAREA (sau mai precis ÎNTÂRZIEREA) arderii scânteilor. După cum ați menționat, majoritatea bicicletelor (biciclete de curse) nu reușesc să funcționeze la RPM ridicate (de obicei peste 10.000 RPM), astfel încât este necesară lansarea în avans a scânteii. Aveam aproape aceeași idee în minte, dar nu puteam testa fizic.
Urmează adăugarea mea propusă la circuitul tău:
Pentru a automatiza comutarea scânteii de tragere între NORMAL și ADVANCE, a circuit tahometru poate fi folosit cu alte câteva componente. Voltmetrul circuitului tahometru este îndepărtat și ieșirea este alimentată în pinul 2 al IC LM741 care este folosit ca comparator. La pinul 3 este atribuită o tensiune de referință de 10V. Circuitul tahometru este conceput pentru a oferi o ieșire de 1V față de 1000RPM, astfel 10V se referă la 10.000RPM. Când RPM este mai mare de 10.000, pinul # 2 are mai mult de 10V și, prin urmare, ieșirea 741 scade (zero).
Această ieșire este conectată la baza T2, prin urmare, ieșirea redusă activează T2. Dacă RPM-ul este sub 10.000, ieșirea crește și, prin urmare, T2 se oprește. În același timp, T4, care este configurat ca invertor de semnal, inversează ieșirea la scăzut și același lucru este conectat la baza T3, prin urmare, T3 este pornit.
Salutari
Abu-Hafss

Precedent: Cum să obțineți energie gratuită dintr-un pendul Următorul: Realizarea unui circuit regulator de tensiune de 3,3V, 5V cu diode și tranzistoare